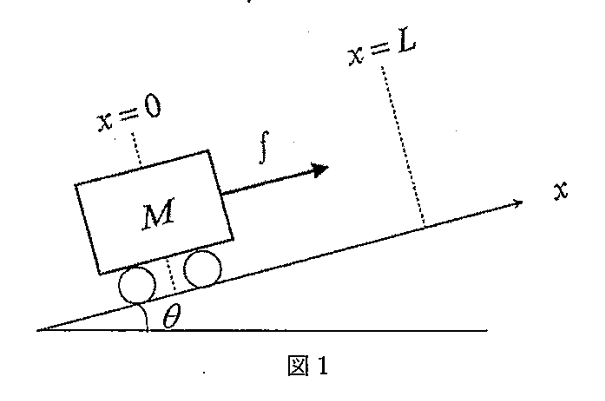
Let us consider to control the position of a cart with mass M placed on a slope with angle θ as illustrated in Figure 1. We can move the cart by force f along the x-axis parallel to the slope. Assume that f can be sufficiently large to pull up the cart. Friction between the cart and the slope and air resistance are negligible. We let f(t),x(t), and v(t) denote the force f, the position, and the velocity of the cart at time t, respectively. The magnitude of gravity acceleration is denoted by g.
Suppose that x(0)=0 and v(0)=0 at time t=0. We consider a method to move the cart to the position x=L. Answer the following questions.
(1) Find the position and the velocity of the cart when we accelerate it with a constant force f(t)=F (F>0) until the time t1.
(2) We want to deaccelerate the cart with a constant force f(t)=−F (F>0) from the time t1 in Question (1) until the time t2 (t2≥t1) so that x(t2)=L and v(t2)=0. Find t1 and t2 which realize this motion.
Next, we consider to give a force proportional to the displacement from the target position x=L. Specifically, we give f(t)=k1{L−x(t)}. k1 is a positive constant.
(3) Write down the equations of motion for this case.
(4) Draw a graph of x(t).
Next, we consider to further add a force proportional to the velocity of the cart. Specifically, we give f(t)=k1{L−x(t)}−k2v(t). k1 and k2 are positive constants.
(5) Explain an effect caused by adding −k2v(t) and the reason why this effect occurs.
(6) Find the condition regarding k1 and k2 so that x(t) does not oscillate. You can use the following facts if necessary.
The general solution of a differential equation
dt2d2x+adtdx+bx=0 (a and b are real-valued constants)⋯(A)
can be represented by the solution of the quadratic equation
r2+ar+b=0⋯(B)
as follows:
When Eq.(B) has two different real roots p and q,
x=C1ept+C2eqt
When Eq.(B) has two different imaginary roots h±ki,
x=eht(C1coskt+C2sinkt)
When Eq.(B) has a double root p,
x=ept(C1+C2t)
Here, C1 and C2 are constants of integration.
(7) Draw a graph of x(t) under the condition obtained in Question (6).
Next, we consider to further add a force proportional to the integral of the displacement from the target position. Specifically, we give f(t)=k1{L−x(t)}−k2v(t)+k3∫0t{L−x(τ)}dτ. k1,k2, and k3 are positive constants.
(8) Explain an effect caused by adding k3∫0t{L−x(τ)}dτ and the reason why this effect occurs.
We apply Newton's second law to the motion of the cart along the slope.
The forces acting on the cart are the applied force F (up the slope) and the component of gravity Mgsinθ (down the slope).
The equation of motion is:
Ma=F−Mgsinθ
The acceleration a1 is:
a1=MF−Mgsinθ
Since initial velocity v(0)=0 and initial position x(0)=0, we integrate with respect to time t:
Velocity:
v(t)=a1t=MF−Mgsinθt
Position:
x(t)=21a1t2=2MF−Mgsinθt2
(2) Bang-Bang Control (Acceleration and Deceleration)
Let the acceleration during the first phase (0≤t≤t1) be a1=MF−gsinθ.
Let the acceleration during the second phase (t1<t≤t2) be a2. The force is −F, so:
a2=M−F−Mgsinθ=−MF−gsinθ
At time t1, the position x1 and velocity v1 are:
v1=a1t1
x1=21a1t12
For t>t1, the velocity is given by v(t)=v1+a2(t−t1). We require v(t2)=0:
This is a harmonic oscillator equation centered at an equilibrium point xeq where the net force is zero:
k1(L−xeq)=Mgsinθ⟹xeq=L−k1Mgsinθ
Given x(0)=0 and v(0)=0, the motion is a cosine wave shifted to start at zero and oscillating around xeq.
x(t)=xeq(1−cos(Mk1t))
The maximum peak is 2xeq. The graph oscillates indefinitely between 0 and 2(L−k1Mgsinθ). It does not settle at L.
Graph:
The vertical axis is x(t), horizontal is t. The curve is a sinusoidal wave starting at (0,0), peaking at x≈2L (minus the gravity offset), and centered at a level slightly below L.
(Note: As an AI text model, I describe the graph. The key feature is sustained oscillation centered below the target L due to gravity).
Effect: The term −k2v(t) acts as a damper (viscous friction). It suppresses the oscillation of the cart, causing the amplitude of the vibration to decay over time so that the position converges to a steady value.
Reason: The force −k2v(t) is always opposite to the direction of motion. This performs negative work on the system, dissipating kinetic energy until the cart stops moving (v=0).
Under the condition k22≥4Mk1 (overdamped or critically damped), the system approaches the equilibrium without oscillating.
The equilibrium position is found by setting derivatives to zero:
k1xfinal=k1L−Mgsinθ⟹xfinal=L−k1Mgsinθ
The cart starts at 0 and asymptotically approaches xfinal, which is slightly less than the target L due to gravity (steady-state error).
Graph:
The curve starts at (0,0) with zero slope, rises smoothly, and flattens out to approach the horizontal asymptote x=L−k1Mgsinθ from below. It never crosses L.
Effect: The addition of the integral term k3∫0t{L−x(τ)}dτ eliminates the steady-state error, causing the cart to converge exactly to the target position x=L.
Reason: In the previous cases (P and PD control), the controller relied on the position error (L−x) to generate force. To counteract gravity (Mgsinθ), a non-zero error was required (steady-state error).
With the integral term, if there is any steady error L−x=0, the integral value grows over time, increasing the applied force f. This accumulation continues until the force is sufficient to balance gravity exactly when the error is zero (x=L). In steady state, x˙=0,x¨=0, and x=L, making the integral term provide the constant force Mgsinθ.
 (Note: As an AI text model, I describe the graph. The key feature is sustained oscillation centered below the target L due to gravity).
(Note: As an AI text model, I describe the graph. The key feature is sustained oscillation centered below the target L due to gravity).