In kinematic calculations and visual computations in robotics, vector operations are expressed with matrices sometimes. Answer the following questions on inner-product, outer-product, projection and rotation of three dimensional vectors. I is the 3×3 identity matrix. The three-dimensional vectors x, a, b and n are 3×1 column vectors:
x=xxxyxz,a=axayaz,b=bxbybz,n=nxnynz.xT, which is a 1×3 row vector, shows the transpose of x.
(1) On the inner product (a,b) between vectors a and b, describe i) the value of (a,b), ii) a 3×3 matrix A which satisfies (a,b)a=Ab, and iii)A with vector a and its transpose aT.
(2) On the outer product a×b from a to b, describe i)3×1 expression of a×b, ii)3×3 expression of the matrix A which satisfies a×b=Ab, iii) the 3×3 matrix Q which satisfies A=a×Q where x×Q between a vector x and a 3×3 matrix Q means a 3×3 matrix whose column vectors are three outer products from the vector x to each column vector in the matrix Q respectively.
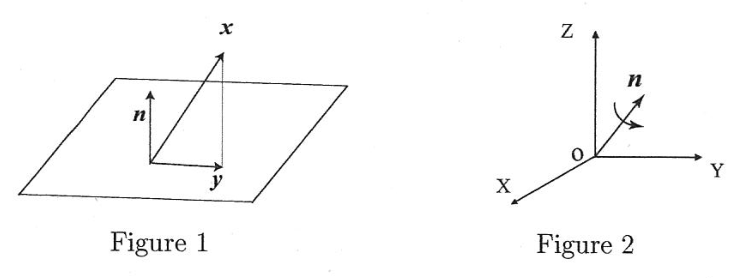
(3) As Figure 1 shows, a vector x is vertically projected to a vector y on a plane whose normal vector is a unit vector n. If the vector y is described as y=Px, show that the matrix P becomes P=I−nnT.
(4) Three rotational matrices Rx(θx), Ry(θy) and Rz(θz) are rotational matrices which rotate a vector x around the X-axis, Y-axis and Z-axis with θx, θy and θz respectively, where the direction of the rotation for plus is clock-wise around the axis from the origin to infinity.
i) Describe 3×3 expression of the matrix Rx(θx), ii) As Figure 2 shows, the 3×3 matrix Rn(θn) is defined as the rotation matrix around a unit orientation vector n with θn. Rn(θn) is described as
Rn(θn)=Rx(−α)Ry(β)Rz(θn)Ry(−β)Rx(α).
Explain what the variables α and β become and explain why the expression is satisfied.