東京大学 情報理工学系研究科 創造情報学専攻 2011年8月実施 筆記試験 第3問
Author
Description
As shown in Figure 1, there is a robot arm which has rotational joints at three points , and , and a two-fingered hand at the end on an - two-dimensional plane. The position of the hand is and the orientation of the hand is , the joint angles are and , and the lengths of the links are and . Answer the following questions:
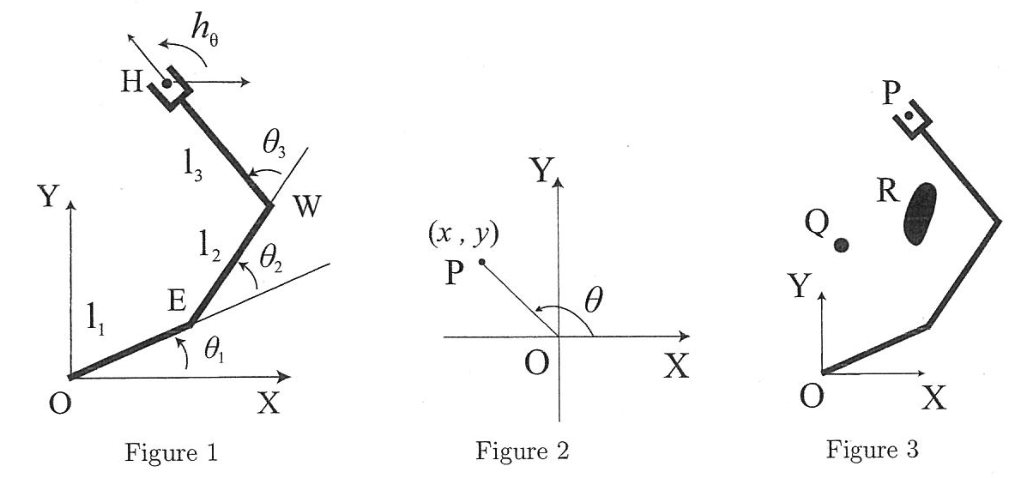
(1) Write equations for the coordinates of the joint in terms of the joint angles and .
(2) As shown in Figure 2, is defined as the angle from the axis to the line , where the point has the coordinates . Describe the definition of the function that calculates from (where ) using .
(3) Describe the procedure which provides the joint angle and from the coordinates of the joint using . The procedure should take account of all the constraints on possible values of the joint angles and .
(4) Write equations for the position and the orientation of the hand in terms of the joint angles and .
(5) Describe the procedure which provides the joint angles and from the position and the orientation of the hand .
(6) As shown in Figure 3, the hand is located at the point and two objects are located at and . Explain a method to generate the trajectory of the joint angles of the robot arm to grasp the object without colliding with the object .