東京大学 情報理工学系研究科 創造情報学専攻 2009年8月実施 筆記試験 第2問
Author
Description
Answer the following questions.
(1) As Figure 1 shows, an orthogonal coordinate frame of a camera with the lens axis and the projection plane is placed at the point . The plane is orthogonal to the lens axis and has the distance from . The point is projected to the point on the plane with the coordinates in . The coordinates of three orientation vectors are described as , and , and the position vector of is in the coordinate frame . The superscript indicates transpose.
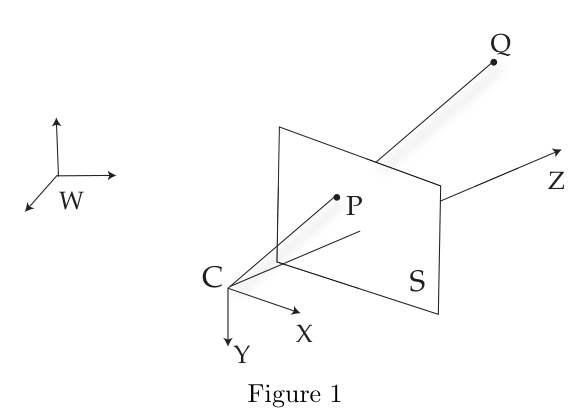
Assume the distance from to is , show the vector from the point to the point with and . When the vector is the position vector of and the rotation matrix of is in , we have . Show the elements of the rotation matrix .
(2) When we observe the point from the camera placed at a point , the projection point is in the camera coordinate frame . Then, we translate the camera with the distance along the axis to a point and rotate it around the axis of the translated coordinate frame with the angle . The rotated camera coordinate frame is . The projection point becomes in . Show the method to get the distance from to and the distance from to , when is obtained. Assume there is no error in the translation and rotation, and the planes of and are aligned in the same plane.
(3) Two cameras are placed at the points and , respectively. Let the position vectors of and be and and the rotation matrices be and . The projection points of on these two cameras become and . As the position vectors and of the point are the same in the coordinate frame . Denote the condition which the projection points and should satisfy.
(4) Assume the projection points are described in an array and the condition in (3) is not satisfied. Let the evaluation function be , and consider minimizing to get . Let and be the distances from and to , respectively, when is minimized. Denote and . Then explain the method to get in with , .
(5) Explain the best arrangement to minimize errors when we measure a three dimensional position by two cameras such as (3).