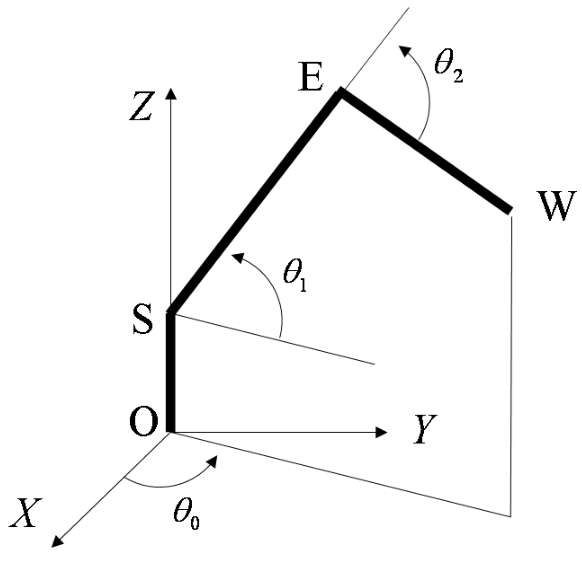
Figure 1 shows an arm which has three joints at O, S and E. The axis of the joint O rotates around Z axis of XYZ coordinates. The axes of joints S and E are vertical to the plane OSEW. Let OS=l0,SE=l1,EW=l2. Answer the following questions.
(1) Show the equation of the forward kinematics of the arm W=f(θ), where W(wx,wy,wz) is the position vector of W and θ(θ0,θ1,θ2) is the vector of the rotation angles around the joints O, S and E.
(2) Describe the velocity V(w˙x,w˙y,w˙z) of the point W by the angular velocity Ω(θ˙0,θ˙1,θ˙2) of the three joints O, S and E.
(3) Show the equation of the inverse kinematics of the arm θ=f−1(W).
(4) Assume a force F(Fx,Fy,Fz) is applied to the point W. Show the joint torque τ(τ0,τ1,τ2) around the three joints O, S and E in order to keep the posture of the arm.